En la teoría de control, el concepto de función de transferencia es algo que encontraras continuamente en varios textos y cursos que te dispongas a realizar. Y no es para menos, pues la función de transferencia es una herramienta importantísima que nos permitirá analizar cómo se comportará un determinado proceso, bien sea industrial o académico, a lo largo del tiempo.
Pero comencemos despacio…
Antes de comenzar te invito a que te unas a la comunidad de CONTROLEROS y CONTROLERAS en YouTUBE para seguir aprendiendo de estos temas de control, programación, instrumentación, microcontroladores, entre otros:
Que es una Función de Transferencia
| Video en Español |
| Video em Português |
En pocas palabras una función de transferencia es una función matemática lineal que emplea la famosa herramienta matemática de la transformada de Laplace y permite representar el comportamiento dinámico y estacionario de cualquier sistema. Sin embargo vamos a detallar este concepto minuciosamente.
Sabemos que cuando nos encontramos en frente de algún proceso, sea cual sea, este proceso por lo general contará con actuadores y sensores. Los actuadores harán con que mis variables (presión, temperatura, nivel, humedad, velocidad, etc) comiencen a variar con el tiempo, mientras que los sensores se encargan de medir y mostrarme como dichas variables están cambiando con el tiempo.
Obviamente nosotros vamos a querer controlar estas variables del proceso, porque simplemente no vamos a dejar que estas variables evolucionen con el tiempo de la manera que ellas quieran. Por decir algo, si tenemos un horno, donde estamos cocinando galletas. No vamos a dejar que la variable temperatura suba a valores muy elevados, porque el resultado sería tener unas galletas totalmente quemadas. Es por eso que debemos controlar la temperatura para que esta se mantenga sobre una determinada zona y nos permita obtener una galletas perfectas!
Antes de continuar, te invito a que conozcas las diferencias de un sistema de control de LAZO ABIERTO y LAZO CERRADO 👈
Origen de la Función de Transferencia
Pero aquí llega el primer inconveniente. Para poder hacer los cálculos matemáticos de nuestros controladores, es de vital importancia, primero y antes que nada, conocer y entender cómo se comporta nuestro proceso. Y tenemos que hallar la forma de representar ese proceso que está en la industria en el Papel. Es decir encontrar alguna ecuación matemática que me permita modelar y simular el comportamiento real de mi proceso.
Ahí es donde tiene origen la función de transferencia. Si observamos los datos que nos entrega algún sensor de nuestro proceso, después de haber aplicado alguna perturbación (es decir después de prender los quemadores, después de abrir una válvula, etc) veremos que la variable comenzará a evolucionar en el tiempo hasta alcanzar otro estado donde se quedara estable, conocido en la literatura como el estado estacionario. Entonces de ese movimiento dinámico podemos clasificar el comportamiento del proceso en el tiempo de dos formas, como lo vemos en la siguiente figura:

En la zona dinámica el sistema va variando con el tiempo, y en la zona estacionaria, el sistema ya no depende más del tiempo, porque sin importar si el tiempo sigue creciendo, la variable se mantiene en el mismo valor.
Los físicos, matemáticos, químicos, necesitaban modelar los procesos industriales, es por eso que en base a estas respuestas dinámicas, se consiguen elaborar ecuaciones diferenciales que representan la evolución de las variables con el tiempo (Como ejemplo se muestra una ecuación diferencial de un reactor)


Ahora trabajar con este tipo de ecuaciones diferenciales puede llegar a ser un poco complicado, es por eso que aplicando el concepto de las Series de Taylor para linealizar aquellas ecuaciones diferenciales que fueran NO lineales. Luego, aplicando una herramienta conocida como la transformada de Laplace, podemos representar nuestro sistema, que originalmente estaba en el dominio del tiempo como una ecuacion diferencial, a representarlo en una nueva variable, llamada la variable compleja o variable frecuencial “S” en forma de ecuaciones algebraicas.
Asi surge la función de transferencia que relaciona la salida del sistema sobre la entrada del mismo. De esa manera se puede saber el comportamiento de un sistema real expresado de una forma matemática cuya información se puede emplear posteriormente para el proyecto y análisis de controladores.
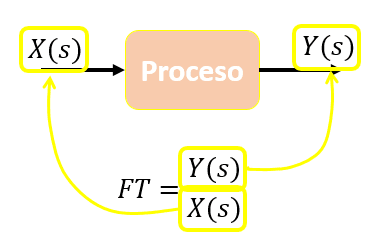
Si analizamos, veremos que las funciones de transferencia se componen de un numerador que es un polinomio y un denominador, que también es un polinomio. Y como todo polinomio tiene raíces, aquí aparece otro concepto que debemos tener claro.
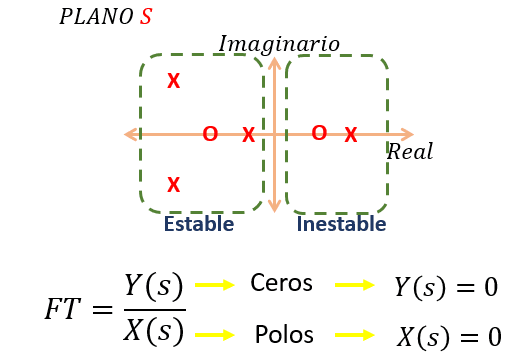
Cuando igualamos el polinomio del numerador a cero, vamos a obtener unas raíces que llamaremos como los “Ceros del Sistema” y haremos lo mismo con el polinomio del denominador, el cual igualaremos a cero y sus raíces se llamaran “Polos del Sistema”
Estabilidad de una Función de Transferencia
Los ceros y polos pueden ser graficados en el plano complejo “S” y aquí podremos determinar si una función de transferencia es estable o inestable.
Simplemente con mirar la ubicación de los Polos del Sistema vamos a saber si el sistema es estable o no.
Si algún polo del sistema se encuentra ubicado en el semiplano derecho del plano “S”, automáticamente sabremos que el sistema es Inestable.
Si encontramos algún cero en esta zona, nuestro sistema NO será inestable, apenas tendrá un determinado comportamiento en su respuesta dinámica que analizaremos más adelante, como por ejemplo respuestas inversas conocidos como ceros de fase no mínima.
Puedes observar la siguiente entrada, si deseas entender el concepto de un Cero de una Función de Transferencia.
Como lo puedes evidenciar los polos y ceros de una función de transferencia caracterizan la forma y el comportamiento que tendrá un determinado sistema ante una eventual entrada de excitación.
Limitadamente o Marginalmente estable
Sin embargo existe unos casos especiales. Que sucede si encontramos los polos en el origen del plano (O sobre todo el eje imaginário) ?
Un sistema es limitadamente estable o criticamente estable si hay un polo en el origen y los demás polos en el semiplano negativo. Este caso también es conocido de forma general como Marginalmente Estable (en literatura), igual al caso siguiente.
Sin embargo si existen más de un polo en el origen el sistema se vuelve inestable.

Por otro lado, un sistema es marginalmente estable si existe una pareja simple (sin multiplicidad) de polos complejos conjugados sobre el eje imaginario (O sea no tienen componente real), estando el resto de los polos en el semiplano negativo. Caso contrario y exista más de una pareja de polos complejos, el sistema sería un sistema inestable.

De forma general, podemos referirnos a todos estos casos como Marginalmente Estables, donde por lo menos exista algún polo en el eje imaginario (Complejo o No) y sin multiplicidad. Note que pueden existir vários polos sobre el eje imaginario, con la condición de que no tengan multiplicidad, o sea no haya polos repetidos.
Como Obtener una Función de Transferencia
Existen diferentes formas de obtener una función de transferencia:
- Linealizando una Ecuación Diferencial y aplicando la transformada de Laplace.
- Tomando datos de los sensores del proceso para aplicar posteriormente técnicas de identificación de sistemas.
Ambas formas de obtener una función de transferencias han sido explicadas en este canal, en el curso de análisis de sistemas. Por ejemplo puedes ver como obtener las funciones de transferencia de un sistema de llenado de tanques aplicando el primer método.
O también puedes ver como obtuvimos la función de transferencia de un horno eléctrico, aplicando el segundo método con un sensor de temperatura y un microcontrolador PIC.
Función de Transferencia en MATLAB
MATLAB, es uno de los softwares especializados para realizar estudios de ingeniería, donde se pueden analizar especialmente sistemas dinámicos lineales representados por funciones de transferencia tales como circuitos RC, sistemas Mecánicos, lazo cerrados de control.
Si deseas conocer un poco más de MATLAB, tenemos un Curso de MATLAB en ESPAÑOL totalmente gratis.
Para hacer una función de transferencia en MATLAB basta con aplicar el comando tf
Por ejemplo, si se tiene la siguiente función de Transferencia

En MATLAB seria algo como:
numerador=[1 0 2]; denominador= [1 -10 8] G=tf(numerador,denominador) %Crea la funcion de transferencia
Donde en las variables numerador y denominador, unicamente se colocan los coeficientes de los polinomios.
Ejemplo de Funcion de Transferencia

Ejercicios de Funciones de Transferencia
Determinar los ceros y los polos de las siguientes funciones de transferencia y graficarlos en el plano complejo S, decir si el sistema es Estable o Inestable. La solución se muestra al final junto con el código en MATLAB para que aprendas desde ya a ingresar funciones de transferencia usando este software.
La formula general, puede ayudarte a determinar las raíces de los polinomios de segundo grado.
s_{1,2}=\dfrac{-b\pm\sqrt{b^2-4ac}}{2a}



Solución
Para ver la solución de los ejercicios, junto con los códigos en matlab, debes compartir el contenido de este post, para que más personas se beneficien de esta información y también para contribuir con que este sitio web siga aportando más contenido gratuito.
[sociallocker id=948]
Ejercicio 1 de función de transferencia
Ceros:  y
y 
Polos:  ,
,  y
y 
tiene un polo en el origen s=0, por lo tanto es marginalmente estable.
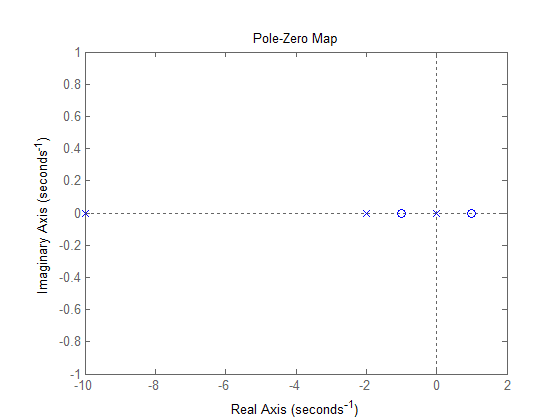
Ejercicio 2 de función de transferencia
Ceros:  y
y 
Polos:  y
y 

Sistema inestable, pues tiene dos polos en el plano derecho
Ejercicio 3 de función de transferencia
Polos:  ,
,  y
y

Sistema estable, pues todos sus polos están en el semiplano izquierdo
Ejercicio 4 de función de transferencia
Polos: 
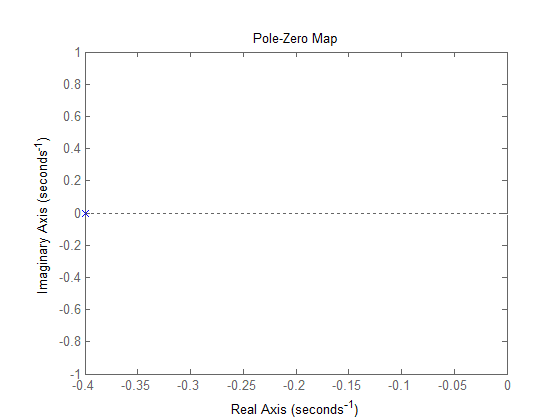
Sistema estable, tiene un unico polo en el semiplano izquierdo. Notar que el cero de (s+1) del numerador se cancela con el polo (s+1) del denominador.
Ejercicio 5 de función de transferencia
Polos:  , ,
, ,  , y
, y
El sistema tiene un polo real y tiene 2 parejas de polos complejos conjugados sin parte real (o sea ubicados en el eje imaginario), por lo tanto es inestable. El sistema tiene en total 5 polos.

Código en Matlab
%Conceptos de Función de Transferencia %Sergio Castaño %Rio de Janeiro - 2017 %https://controlautomaticoeducacion.com %% %Ejercicio 1 %el comando "conv" hace el producto de 2 polinomios num1=conv([1 1],[1 -1]); %(s+1)(s-1) %debemos usar 2 veces el comando "conv" den1=conv([1 0],conv([1 2],[1 10])); %s(s+2(s+10) %Creamos la Funcion de transferencia con el comando "tf" G1=tf(num1,den1) %Graficamos los polos y ceros figure pzmap(G1) %% Ejercicio 2 %el comando "conv" hace el producto de 2 polinomios num2=[1 0 2]; %(s^2+2) %debemos usar 2 veces el comando "conv" den2=[1 -10 8]; %s^2-10s+8 %Creamos la Funcion de transferencia con el comando "tf" G2=tf(num2,den2) %Graficamos los polos y ceros figure pzmap(G2) %% Ejercicio 3 %el comando "conv" hace el producto de 2 polinomios num3=1; %1 %debemos usar 2 veces el comando "conv" den3=conv([1 2],[1 10 7]); %(s+2)(s^2+10s+7) %Creamos la Funcion de transferencia con el comando "tf" G3=tf(num3,den3) %Graficamos los polos y ceros figure pzmap(G3) %% Ejercicio 4 %el comando "conv" hace el producto de 2 polinomios num4=1; %1 %debemos usar 2 veces el comando "conv" den4=[10 4]; %notar que el (s+1) se cancela con el del numerador %Creamos la Funcion de transferencia con el comando "tf" G4=tf(num4,den4) %Graficamos los polos y ceros figure pzmap(G4)
Aplicaciones Avanzadas de la Función de Transferencia en Ingeniería de Control
En el ámbito de la ingeniería de control, la función de transferencia no es simplemente una herramienta teórica, sino que es fundamental para el diseño y análisis de sistemas de control modernos. Más allá de su definición matemática, la función de transferencia desempeña un papel crucial en la modelación de sistemas dinámicos, permitiendo a los ingenieros predecir la respuesta de un sistema ante diversas entradas y condiciones operativas. En este contexto, en este sitio web exploramos aplicaciones avanzadas de la función de transferencia, incluyendo su integración con tecnologías de control predictivo y optimización de sistemas multivariables.
Una comprensión profunda de la función de transferencia facilita el diseño de controladores PID (Proporcional-Integral-Derivativo), que son esenciales para el mantenimiento de la estabilidad y la optimización del rendimiento en la industria. Además, en el ámbito académico, la función de transferencia se utiliza para enseñar conceptos fundamentales de la teoría de control, como la estabilidad de Bode y el análisis de Nyquist, que son piedras angulares en el estudio de sistemas automáticos.
La evolución de las herramientas computacionales ha permitido una exploración más profunda de la función de transferencia, con software como MATLAB y Simulink ofreciendo un entorno dinámico para simular y analizar comportamientos de sistemas en tiempo real. Esta convergencia de teoría y tecnología pone de manifiesto la relevancia continua de la función de transferencia en la vanguardia de la ingeniería de control, donde la teoría se encuentra con la aplicación práctica para diseñar soluciones innovadoras en automatización y robótica.
Invitamos a nuestros lectores a profundizar en estas aplicaciones avanzadas, descubriendo cómo la función de transferencia sigue siendo un pilar en el diseño de sistemas de control complejos y en la educación en ingeniería.
Eso es todo por la entrada del dia de hoy, espero les haya gustado y hayan aprendido algo nuevo. Si te ha servido el contenido de esta entrada, de los videos y los códigos de implementación y deseas apoyar mi trabajo invitandome a un café super barato, puedes hacerlo en el siguiente link:
👉 Invitar a Sergio a un Café ☕️
Que esten muy bien, nos vemos en la siguiente entrada.