Hola controleros y controleras, el día de hoy vamos a estudiar el método de la integral del error para la sintonia de los controladores PID.
Antes de comenzar, te invito a que veas nuestro curso gratuito de Sistemas de Control Realimentado.
Y que te suscribas al canal para que sigas aprendiendo más sobre la teoría de control y programación.
Método de la Integral del Error
Video en español
Video em Português
Inicialmente propuesto en [Lopez et a., 1967] para perturbaciones de carga y posteriormente fue extendido por [Rovira et al., 1969] para seguimiento de referencias.
El método propone utilizar los criterios de desempeño de la integral del error por un periodo de tiempo que sea suficiente para eliminar el error en regimen permanente.
La ventaja de este método es que considera toda la curva del sistema, en lugar de considerar la razón de declino del 1/4 (C/A) de los métodos de Ziegler y Nichols y de Cohen y Coon.

En la práctica suele usarse principalmente el critério IAE (Integral del valor absoluto):

Y el ITAE (Integral del valor absoluto multiplicado por el tiempo):

Siendo esta última menos sensible a los errores que suceden después de la perturbación.
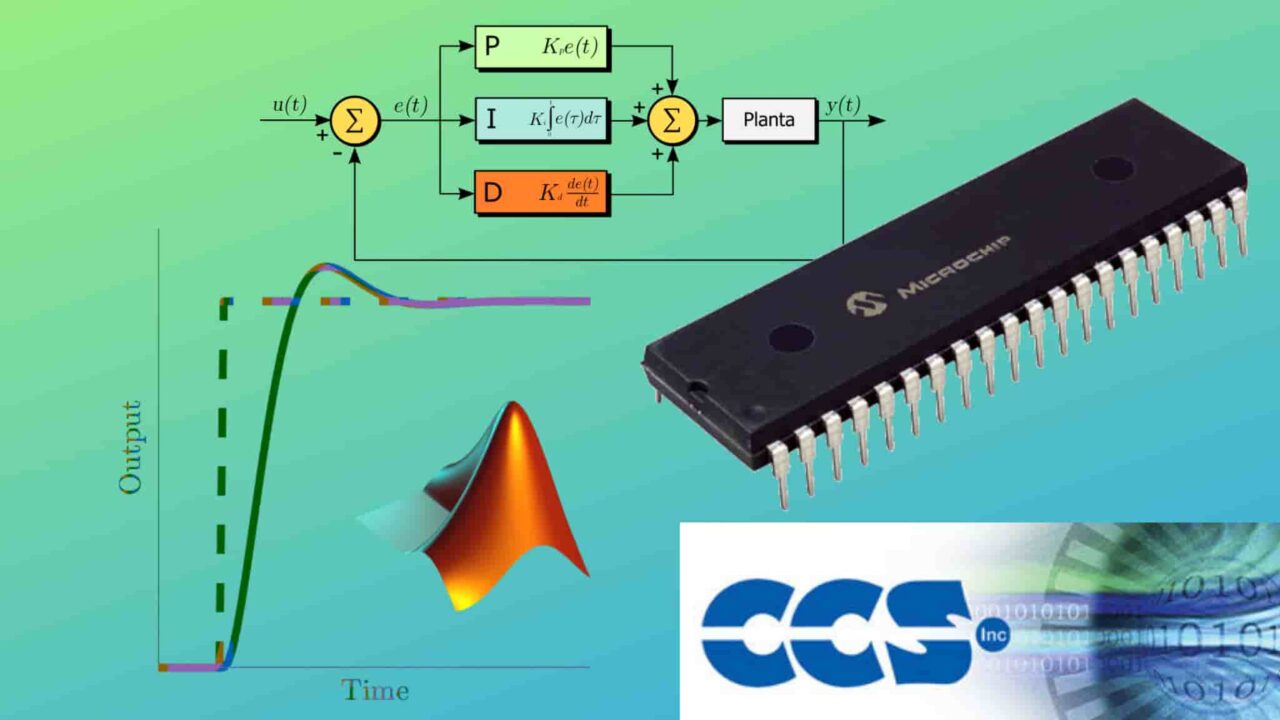
El método de sintonia utiliza la ecuación del controlador PID paralelo clásico:

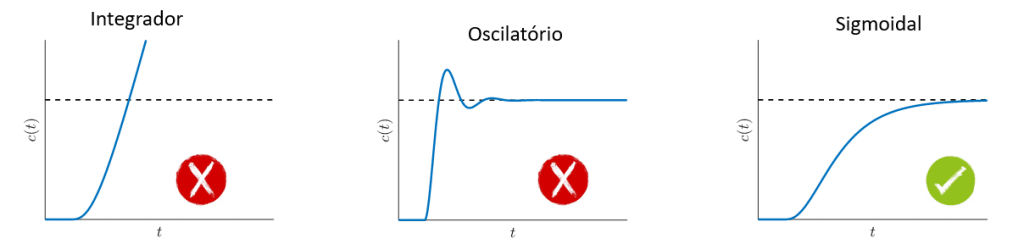
Este método también supone que la dinámica tenga un comportamiento en forma de S, es decir que pueda ser representado por una función de transferencia de primer orden con retardo:


Control PID con Raspberry Pi Pico

Todo sobre Ziegler Nichols – Sintonia de Control PID
Controladores PID Discreto
Sintonia Control PID Via Integral del Error
En el trabajo de [Lopez et a., 1967] se consideró una perturbación de carga por lo tanto el principal objetivo del controlador era la de rechazo de distúrbios (problema regulatório).
Esta propuesta fue resuelta numéricamente por medio de algoritmos de optimización con el fin de minimizar la integral del error para varias razones entre tiempo muerto y la constante de tiempo del proceso (factor de incontrolabilidad ( ).
).
El rango de análisis fue de factores de incontrolabilidad entre 0 y 1. [ ]. Seguidamente fue planteada la siguiente regresión para obtener las ecuaciones de la sintonia:
]. Seguidamente fue planteada la siguiente regresión para obtener las ecuaciones de la sintonia:
Las constantes A, B, C, D, E, F se obtienen a partir de la siguiente tabla para cada tipo de controlador (PI o PID) y para cada criterio (IAE o ITAE).

En el trabajo de [Rovira et al., 1969] se consideró un disturbio en el setpoint (Tipo Servo). Y de la misma forma fue resuelto un problema de optimización numéricamente y despues una regresión para obtener las siguientes ecuaciones de sintonia (donde solo la ecuación para el cálculo del tiempo integral es diferente al anterior)
Las constantes  se obtienen a partir de la siguiente tabla para cada tipo de controlador (PI o PID) y para cada criterio (IAE o ITAE).
se obtienen a partir de la siguiente tabla para cada tipo de controlador (PI o PID) y para cada criterio (IAE o ITAE).

Ejemplo de Sintonia PID via Integral del Error
Tenemos el siguiente proceso representado por medio de una función de transferencia de segundo orden:
G(s)=\dfrac{2}{(2s+1)(5s+1)}El objetivo es identificar un modelo de primer orden con retardo del proceso anterior y sintonizar un controlador PID usando el método CHR.
- Curso de Sistemas de Control en Dispositivos Microcontrolados en UDEMY (PIC y ARDUINO)
- Certificado de Aprobación una vez finalices el Curso
- DESCUENTO si accedes directamente con los siguientes botones de acceso.
- NOTA: Si buscas el curso directamente en UDEMY o si lo adquieres en otra plataforma distintas a las mostradas anteriormente NO OBTENDRÁS NINGUN DESCUENTO sobre el valor final del Curso.

Bibliografía
- Controles Típicos de Equipamentos e Processos Industriais. Eng. Mario Cesar M. Massa de Campos , Eng. Herbert Campos Gonçalves Teixeira.
- López A.M., Miller J.A., Smith C.L., Murrill P.W. Tuning Controllers with Error-Integral Criteria Instrumentation Technology, 14 (1967), pp. 57-62
- Rovira A., Murrill P.W., Smith C.L. Tuning Controllers for Setpoint Changes Instrumentation & Control Systems, 42 (1969), pp. 67-69
Eso es todo por la entrada del dia de hoy, espero les haya gustado y hayan aprendido algo nuevo. Si te ha servido el contenido de esta entrada, de los videos y los códigos de implementación y deseas apoyar mi trabajo invitandome a un café super barato, puedes hacerlo en el siguiente link:
👉 Invitar a Sergio a un Café ☕️
Que esten muy bien, nos vemos en la siguiente entrada.