En esta esntada aprenderemos a determinar la ESTABILIDAD de un SISTEMA DINÁMICO LINEAL usando la ecuación de LYAPUNOV.
Para sistemas lineales e invariantes en el tiempo el análisis de estabilidad es una tarea relativamente simple, sin embargo los métodos de estabilidad vistos anteriormente, no pueden ser aplicados en el análisis de sistemas lineales variantes en el tiempo ni tampoco en sistemas no lineales. Sin embrago existe un criterio de estabilidad que puede ayudarnos en ese proceso, y es conocido como el Criterio de Estabilidad de Lyapunov.
Esta entrada, hace parte de nuestro curso de Sistemas Dinámicos Lineales basados principalmente en Espacio de Estados, si te interesa ver las entradas disponibles del Curso Gratuito puedes hacerlo usando el siguiente link:
👉 CURSO GRATIS SISTEMAS DINÁMICOS LINEALES
Antes de comenzar, te invito a que te suscribas de forma GRATUITA al Canal de YouTube para que aprendas más sobre estos temas.
Criterio de Estabilidad de Lyapunov
Una forma genérica para analizar la estabilidad de sistemas es a través de la teoría de estabilidad de Lyapunov, donde dicho análisis es determinado de forma indirecta. Porque no se usa directamente la dinámica del sistema si no que por el contrario se analiza como el sistema se está comportando.
Esta idea surgió en el siglo 19 donde todo se basa en energía, en aquella época solo existían sistemas mecánicos, entonces si la energía de ese sistema mecánico va para cero al momento del tiempo tender a infinito, se podría caracterizar un sistema como estable.
Se sabe que la energia siempre es una función escalar construida a partir de la dinámica del sistema.
Las expresiones para definir la energía son infinitas, dependiendo del tipo de aplicación con la cual se desee trabajar (energia potencial, cinetica,…)
Básicamente se asocia al sistema una función escalar  de tal forma que capture la energía asociada a la trayectoria del sistema y voy a analizar si dicha función va para cero en el transcurrir del tiempo.
de tal forma que capture la energía asociada a la trayectoria del sistema y voy a analizar si dicha función va para cero en el transcurrir del tiempo.
Esta función escalar asocia la norma de los estados del sistema.
Energia de una Señal (Para el análisis de Lyapunov)
Si para nuestro análisis comenzamos recordando cual es la energia de una señal en el tiempo (Teorema de Lyapunov):


Ahí se analiza si esa función va para cero a lo largo del tiempo. Una característica de esa definición de energía es que ella siempre es positiva:
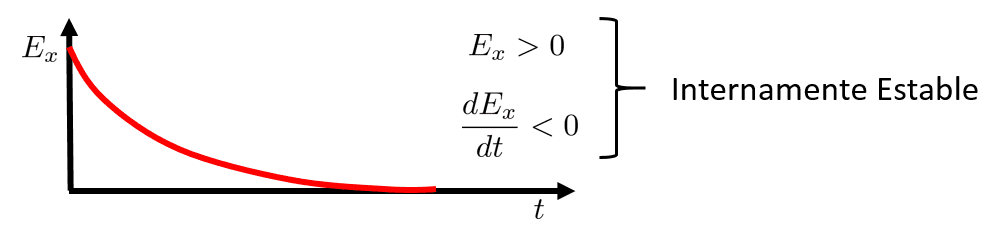
Para la integral poder ir para cero, se analiza que la característica de la gráfica es siempre positiva y que la derivada es siempre negativa, porque ella siempre decrece. Y si se cumplen esas dos características, ese sistema siempre va ir para cero.
Entonces se verifica que un sistema es internamente estable si la energía es


Ahora si se tiene más de un estado, o sea que no es solo un escalar, se puede usar la definición de producto interno

El único problema es que si por ejemplo mi función de energía no tiene una derivada que sea siempre negativa

Dicha función es estable porque va para cero, pero no cumple con las dos propiedades, entonces yo no consigo capturar la dinámica de esa energía. El problema de esa abordaje, es que la función que se vaya a utilizar debe ser monotonicamente decreciente. Para conseguir eso se coloca una matriz P en los estados y se intenta hallar la matriz tal que la función sea monotonicamente decreciente

En conclusión, para determinar la estabilidad por Lyapunov, consiste en poder determinar una función que presente un comportamiento de energía monótono para decir que el sistema es estable, de lo contrario si no se consigue determinar esta función, en términos generales no quiere decir que el sistema sea inestable.
Propiedades de Matrices Simétricas para el método de Lyapunov
Para entender como analizar el criterio de estabilidad de Lyapunov, es necesario rever algunas propiedades de las matrices simétricas:
Si M es una matriz cuadrada (m m)
m)
Si  se dice que es una matriz Simetrica.
se dice que es una matriz Simetrica.
Si  se dice que es una matriz Antisimetrica.
se dice que es una matriz Antisimetrica.
1. Cualquier matriz cuadrada equivale a la suma de una matriz simetrica y una matriz antisimetrica

2. La función cuadrática  asociada a una matriz antisimetrica es siempre CERO.
asociada a una matriz antisimetrica es siempre CERO.

Luego, la función con M simétrica o no, es igual a una función cuadrática con matriz simétrica.
Matrices definidas positivas:
Una matriz cuadrada (m m) es definida positiva si

Lo que quiere decir que la Matriz M es definida positiva si la funcion es definida positiva.
Estabilidad de Lyapunov Aplicado a Sistemas Lineales
Si tenemos un sistema lineal  y probamos con la función de Lyapunov
y probamos con la función de Lyapunov 
Primero derivamos la función de Lyapunov


La derivada tiene que ser menor que cero
Como  es una forma cuadrática si yo tomo ese resultado que va a ser una matriz que es Simetrica basta con analizar los autovalores de esa matriz, si todos los autovalores son negativos, la matriz es definida negativa lo que indica que la derivada de Lyapunov siempre dará negativa.
es una forma cuadrática si yo tomo ese resultado que va a ser una matriz que es Simetrica basta con analizar los autovalores de esa matriz, si todos los autovalores son negativos, la matriz es definida negativa lo que indica que la derivada de Lyapunov siempre dará negativa.
Por otro lado si en la ecuación cuadratica ( ) si M tiene todos los autovalores positivos, esa ecuación siempre va a dar positivo garantizando la estabilidad.
) si M tiene todos los autovalores positivos, esa ecuación siempre va a dar positivo garantizando la estabilidad.
Ahora esto solo vale si yo conozco la matriz M,si yo no conozco dicha matriz tendria que encontrar una Matriz M simetrica con todos los autovalores positivos de forma que tenga todos los autovalores negativos

Para poder resolver ese problema analíticamente, en lugar de trabajar con esa desigualdad, se puede transformar esa expresión en una ecuación lineal.
Si tengo esta ecuación:

Si esa matriz N tiene todos los autovalores positivos y colocamos un signo (-) alfrente de N, quiere decir que esa matriz es Negativa. De esa forma consigo demostrar que el termino es menor que cero resolviendo una simple ecuación. Esto es conocido como la ECUACIÓN O FUNCIÓN DE LYAPUNOV.
De esa forma consigo por medio de un sistema de ecuaciones encontrar una matriz M. Solo que cuando hallamos esa M, ademas de ser una matriz Simétrica ella debe tener todos los autovalores Positivos.
Teorema 1
Si todos los autovalores de A tienen parte real negativa si y solo si para una matriz dada que sea simétrica positiva N a la ecuación de Lyapunov  se consigue una unica solución simétrica y definida positiva M. Indicando que el sistema es Estable caso contrario es Inestable (esto es solo valido para sistemas LTI), para No lineales o variantes en el tiempo, simplemente no se puede concluir.
se consigue una unica solución simétrica y definida positiva M. Indicando que el sistema es Estable caso contrario es Inestable (esto es solo valido para sistemas LTI), para No lineales o variantes en el tiempo, simplemente no se puede concluir.
Teorema 2
Si todos los autovalores de A tienen parte real negativa entonces la ecuación de Lyapunov tiene una unica solución para una dada matriz N simetrica y definida positiva dada por:

Se define a  como la ecuación de Lyapunov. Y la estabilidad asintotica del sistema está asegurada si siendo P una matriz simetrica definida negativa, se puede encontrar Q como una matriz simetrica definida positiva (Solución de la ecuación de Lyapunov)
como la ecuación de Lyapunov. Y la estabilidad asintotica del sistema está asegurada si siendo P una matriz simetrica definida negativa, se puede encontrar Q como una matriz simetrica definida positiva (Solución de la ecuación de Lyapunov)
Si los autovalores de A cumplen lo siguiente:
- Q es definida positiva si
 de A
de A - Q es definida negativa si
 de A
de A - Q es indefinida si
 y
y  de A
de A
Estabilidad de Lyapunov Ejercicios Resueltos

Sabemos que el sistema es asintoticamente estable si
 y
y 
Tomamos como función de Lyapunov la expresión cuadrática:
y
Determinamos los Autovalores de A.

Sea  y
y





Ecuaciones:





Calculando los autovalores de la matriz M tenemos que:

Como los autovalores son positivos, quiere decir que la Matriz M es simetrica y definida positiva, por lo tanto el sistema es estable.
Lyapunov en MATLAB:
> M=lyap(A,N)
A=[0 1;-4 -5]; %Matriz Dinámica N=eye(2); %Matriz Identidad M=lyap(A,N); %Lyapunov eig(M) %Autovalores de M, Ver que son POSITIVOS por lo tanto SISTEMA ESTABLE!! %Se puede verificar también que la derivada es CERO (Decresciente) %Para eso debemos dar un help lyap para entender como esta la ec. de Lyapunov %en MATLAB, veremos que la ecuación invierte las matrices %>> help lyap %X = lyap(A,Q) solves the Lyapunov matrix equation: % A*X + X*A' + Q = 0 %Por lo tanto, la derivada es: eig(A*M+M*A')
Método de Lyapunov para Sistemas Discretos
Para el caso discreto la función de la energia de una señal viene dada por:

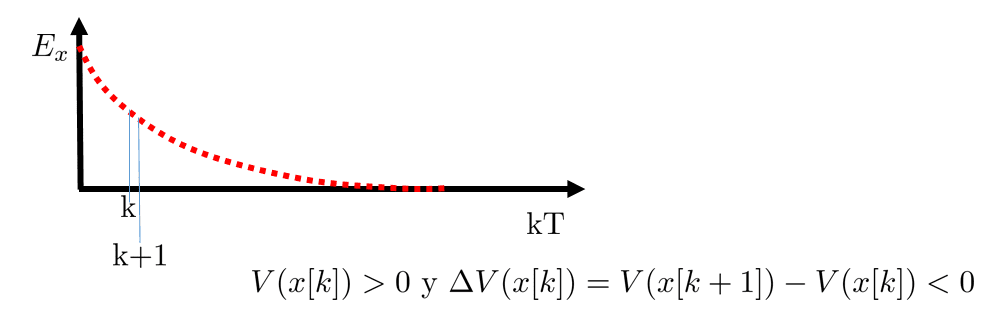
Para verificar si la función está decreciendo, siempre la diferencia entre un instante futuro con relación a un instante actual debe dar negativo.
![V(x[k])>0](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-d8930ce9f03aa3e14f35782a03c0bdf6_l3.png "Rendered by QuickLaTeX.com") y
y ![\Delta V(x[k])=V(x[k+1])-V(x[k])<0](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-0f07767a40126de61b067aac821469bd_l3.png "Rendered by QuickLaTeX.com")
La ecuación de Lyapunov para el caso discreto viene dado por:
Si se tiene un sistema discreto
![x[k+1]=Ax[k]](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-7fad793c26ae6cd05dd84de9c59ee5d7_l3.png "Rendered by QuickLaTeX.com")
Y se utiliza la función de Lyapunov mas simple, conocida como función de Lyapunov Cuadrada:
![V(x[k])=x[k]^TMx[k]>0](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-9fec18526f9a642c9d4adc9f28fae8ab_l3.png "Rendered by QuickLaTeX.com")
Y ya sabemos que como es una ecuación cuadrática, la matriz M tiene que tener todos los autovalores positivos y también ser simétrica.
Se calcula entonces la variación de la función:
![\Delta V(x[k])=x[k+1]^TMx[k+1]-x[k]^TMx[k]<0](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-5da4e8f8935c116158bbb0cdf879a21e_l3.png "Rendered by QuickLaTeX.com")
![\Delta V(x[k])=(Ax[k])^TM(Ax[k])-x[k]^TMx[k]<0](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-b60931460de7a59c6ef67528777e53f9_l3.png "Rendered by QuickLaTeX.com")
![\Delta V(x[k])=x[k]^TA^TMAx[k]-x[k]^TMx[k]<0](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-16e5caa2963c22cb7a527bffdddbe8d6_l3.png "Rendered by QuickLaTeX.com")
![\Delta V(x[k])=x[k]^T(A^TMA-M)x[k]<0](https://controlautomaticoeducacion.com/wp-content/ql-cache/quicklatex.com-fd24d3b2ba50cfe6f9f76920bf997a4a_l3.png "Rendered by QuickLaTeX.com")
Y esta también es una forma cuadrática.
Para determinar si es estable basta con analizar si todos los autovalores de la matriz  son menosres que cero.
son menosres que cero.
Para resolver analíticamente, se iguala la matriz a otra matriz negativa N, igual que en el caso continuo

Si consigo determinar una matriz M definida positiva puedo decir que mi sistema dinámico Lineal e invariante en el tiempo es estable, recordando que si no es definida positiva seria inestable.
Para el caso de Lineal y Variante en el tiempo y No lineal en el caso de la matriz M ser definida negativa, no se puede determinar nada, y se tendria que seguir buscando otra función de Lyapunov.
Eso es todo por la entrada del dia de hoy, espero les haya gustado y hayan aprendido algo nuevo. Si te ha servido el contenido de esta entrada, de los videos y los códigos de implementación y deseas apoyar mi trabajo invitandome a un café super barato, puedes hacerlo en el siguiente link:
👉 Invitar a Sergio a un Café ☕️
Que esten muy bien, nos vemos en la siguiente entrada.