Hola controleros y controleras, bienvenidos a otra entrada de la pagina WEB donde voy a explicarte en detalle en que consiste el Control FeedForward, cual es su principio de funcionamiento, como calcularlo y haremos un ejemplo de implementación el cual encontrarás al final de este post.
Este tipo de estructura de control es muy importante y muy utilizada en la industria, junto con la estructura de control conocida como 👉 Control en Cascada.
Antes de comenzar te hago la invitación para que 👉 Visites el Curso de Control Realimentado.
Control FeedForward
Video en Español
Video em Português
La idea del control por Feedforward es crear un controlador auxiliar en el lazo cerrado de control que permita atenuar o eliminar el ingreso de perturbaciones medidas o conocidas al lazo de control, es por eso que se llama control anticipativo, porque trata de anticiparce a las perturbaciones que van a afectar mi sistema.
Para que puedas entender adecuadamente este control, debes tener muy claro los conceptos sobre que es un Sistema de Control de Bucle Abierto y Bucle Cerrado 👈
Funcionamiento del Control FeedForward
Primero se mide alguna variable que afecta la salida controlada (perturbación) y se crea un camino alternativo de la señal para intentar compensar el efecto que esta causa. Este camino es a través del control feedforward presentado en la siguiente figura y como puede apreciarse el control feedforward o control anticipativo es un control ede lazo abierto.

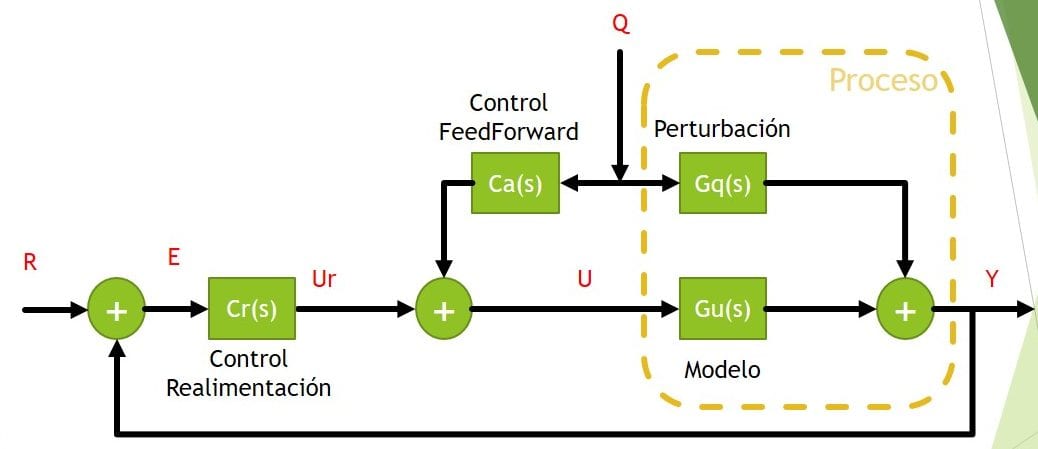
En resumen, podemos aplicar un control FeedForward siempre y cuando se pueda medir la perturbación que va a entrar al proceso. Veamos como se representa esto en diagrama de bloques.

Con la adición del Control FeedForward tenemos dos caminos por donde va a pasar nuestra perturbación, y la idea entonces es anticiparnos al camino rojo que pasa por Gq(s) por medio del camino rojo que pasa por Ca(s). Matematicamente desarrollando el algebra de bloques.
y(s)=G_u(s)U(s)+G_q(s)Q(s)
CONTROL
U(s)=C_a(s)Q(s)+U_r
y(s)=G_u(s)[C_a(s)Q(s)+U_r]+G_q(s)Q(s)
Como tenemos un sistema Lineal dinamico, podemos aplicar el teorema de superposición, donde la suma de las entradas me va a dar la salida.
En este caso tengo dos entradas que son Ur(s) y Q(s) y una salida que es Y(s). Entonces voy a colocar la entrada Ur(s) en cero, y como yo NO quiero que la perturbación Q(s) llegue hasta la salida, voy a colocar Y(s) también en cero. Y de esta manera voy a encontrar que termino de Ca(s) hace que dicha perturbación no llegue a la salida.
0=G_u(s)C_a(s)Q(s)+0+G_q(s)Q(s)
G_u(s)C_a(s)Q(s)=-G_q(s)Q(s)
C_a(s)=\frac{-G_q(s)}{G_u(s)}De esta manera tenemos dos formas de sintonizar el controlador FeedForward
Estático: Solamente se considera las ganancias de cada camino
Dinámico: Considera las constantes de tiempo.
Control Proporcional
C_a(s)=\frac{-K_q}{K_u}Filtro de Primer orden
C_a(s)=\frac{-K_q (T_u s+1)}{K_u (T_q s+1)}
La estrategia de FeedForward control junto con el control por realimentación se presenta en la siguiente figura.
A continuación te dejo el video donde te explico todo detalladamente y en la parte final del video te explico el ejemplo, te explico el código hecho en matlab y sobre la simulación. Recuerda suscribirte al canal para que recibas todas mis actualizaciones.

Método Cohen y Coon de Sintonía para Controles PID

Lazo Abierto y Lazo Cerrado

Diagrama de Bloques en Sistemas de Control
Contestualización del control FeedForward
Para dejar totalmente claro el funcionamiento de esta estructura de control el cual podremos usarlo en conjunto con la estructura de control en cascada explicado en otro post, vamos a abordar un ejemplo claro para entender el concepto de FeedForward control de procesos el cual está representado por el siguiente esquema y explicado a continuación:

En la figura anterior, tenemos un ejemplo práctico donde podemos emplear un controlador FeedForward o Anticipativo. La figura representa un proceso de calentamiento de agua, por medio medio de la combustión de una llama, que es regulada por una válvula de gas (V2) y una válvula de aire manual (V1). Nuestro control principal o por realimentación (TC) se encarga de controlar la temperatura por medio de la valvula (V2), pero si analizamos este proceso, la entrada de agua fría va a perturbar nuestra variable controlada, por eso, si adicionamos un sensor de temperatura en la entrada de agua, nuestro controlador va poder saber lo que sucede en la entrada y se va a anticipar a la perturbación que va a ingresar a nuestro proceso, conformando así, un controlador por FeedForward.
Ejemplo del Calentador
Diseñar un controlador FeedForward para el caso del calentador de agua, usando el diagrama de bloques combinando las dos acciones, la accion de realimentación y la acción anticipativa.
Modelo de la Temperatura de salida
G_u(s)=\frac{1.45}{(4.5s+1)}Modelo de la temperatura de entrada
G_q(s)=\frac{1}{(3.5s+1)}Control Anticipativo constante
C_a(s)=\frac{-1}{1.45}Control Anticipativo de orden 1
C_a(s)=\frac{-(4.5s+1)}{1.45(3.5s+1)}
A continuación les dejo todo el código de MATLAB para que ustedes mismos puedan simular el ejemplo desde su propio computador, donde esta la solución de este ejemplo. Adicional a eso les voy a dejar el diagrama en Simulink para que lo descarguen. Recuerda que para accesar a esta información solo tienes que compartir en redes sociales al contenido de este post con alguno de los botones de abajo.
%% Control FeedForward
%Por Sergio Andres Castaño
% controlautomaticoeducacion.com
%_________________________________________________________
%Modelo de la Temperatura de salida
Gu=tf(1.45,[4.5 1]);
%Modelo de la temperatura de entrada
Gq=tf(1,[3.5 1]);
%Control Anticipativo constante
Ca1=tf(-1,1.45);
%Control Anticipativo de orden 1
Ca2=tf(-[4.5 1],1.45*[3.5 1]);
%% Control por Realimentacion
%Control simple PI por cancelación de polos
Ti=4.5; %Coloca el TI igual al tao de la planta
Tr=4.5/3; %Tr es la velocidad que deseo para mi lazo de control, lo escojo 3 veces m
%mas rapido que el lazo abierto
Kc=Ti/(1.45*Tr); %Encuentro Kc
C=tf(Kc*[Ti 1],[Ti 0]); %Control PI
Perfecto controleros y controleras, llegamos al final de nuestra clase de FeedForward Control de procesos, espero hayan entendido esta importante estructura de control tan utilizada en la industria para el rechazo de perturbaciones.
Si te ha gustado el contenido de este post y del Video, podrías invitarme a un café y ayudarme a mantener este sitio WEB en pie para seguir aportando más contenido útil y de calidad, un café es muy barato.
👉 Invitar a un Café a Sergio ☕️
Bueno amigos, me despido de ustedes, nos vemos en una próxima oportunidad. Que tengan un excelente Día.